Page History
...
The IPS pipeline performs a relatively complex data processing task. To make the software easier to understand, it is broken down into independent, stateless processing steps.
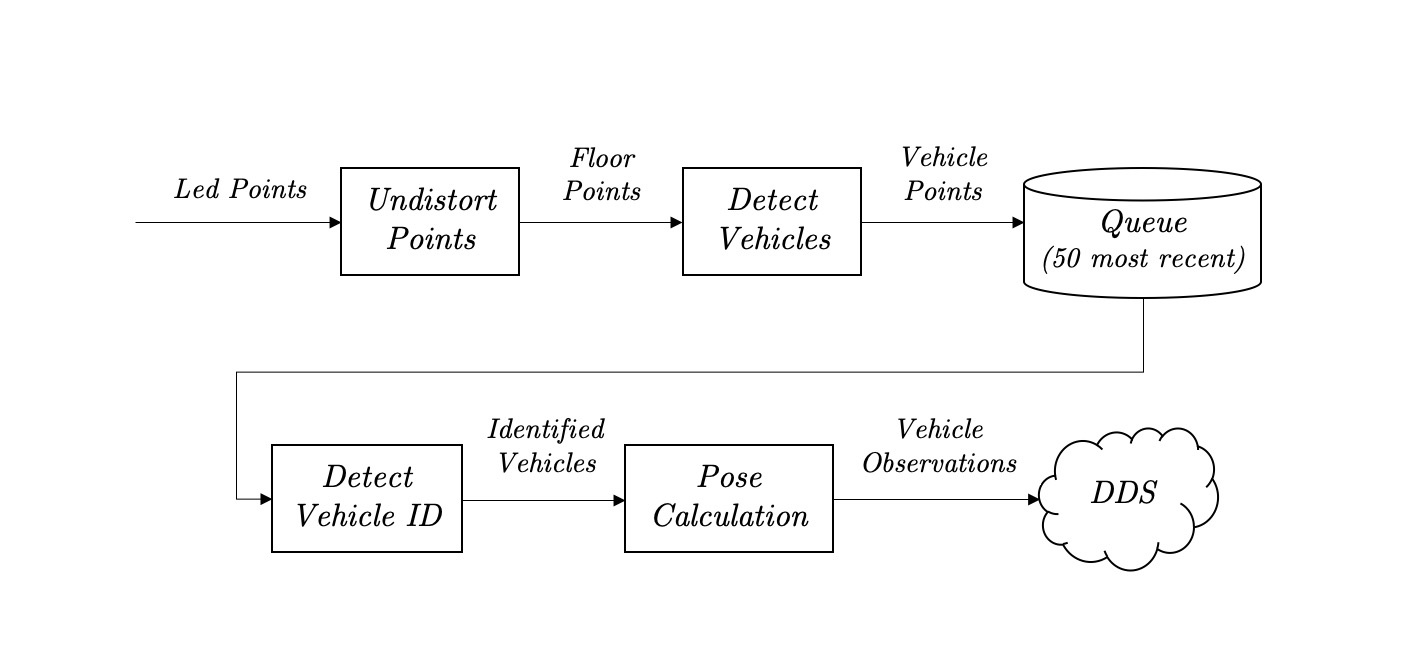
The UndistortPoints function transforms the image/pixel coordinates to metric coordinates on the driving surface (floor). The calculation is based on a calibration image. See https://git.rwth-aachen.de/CPM/Project/Lab/software/tree/master/matlab_scripts/camera_calibration
The DetectVehicles function groups and classifies points as front, center, back_left or back_right. Points that appear to not belong to a vehicle are discarded.
Overview
Content Tools