Page History
...
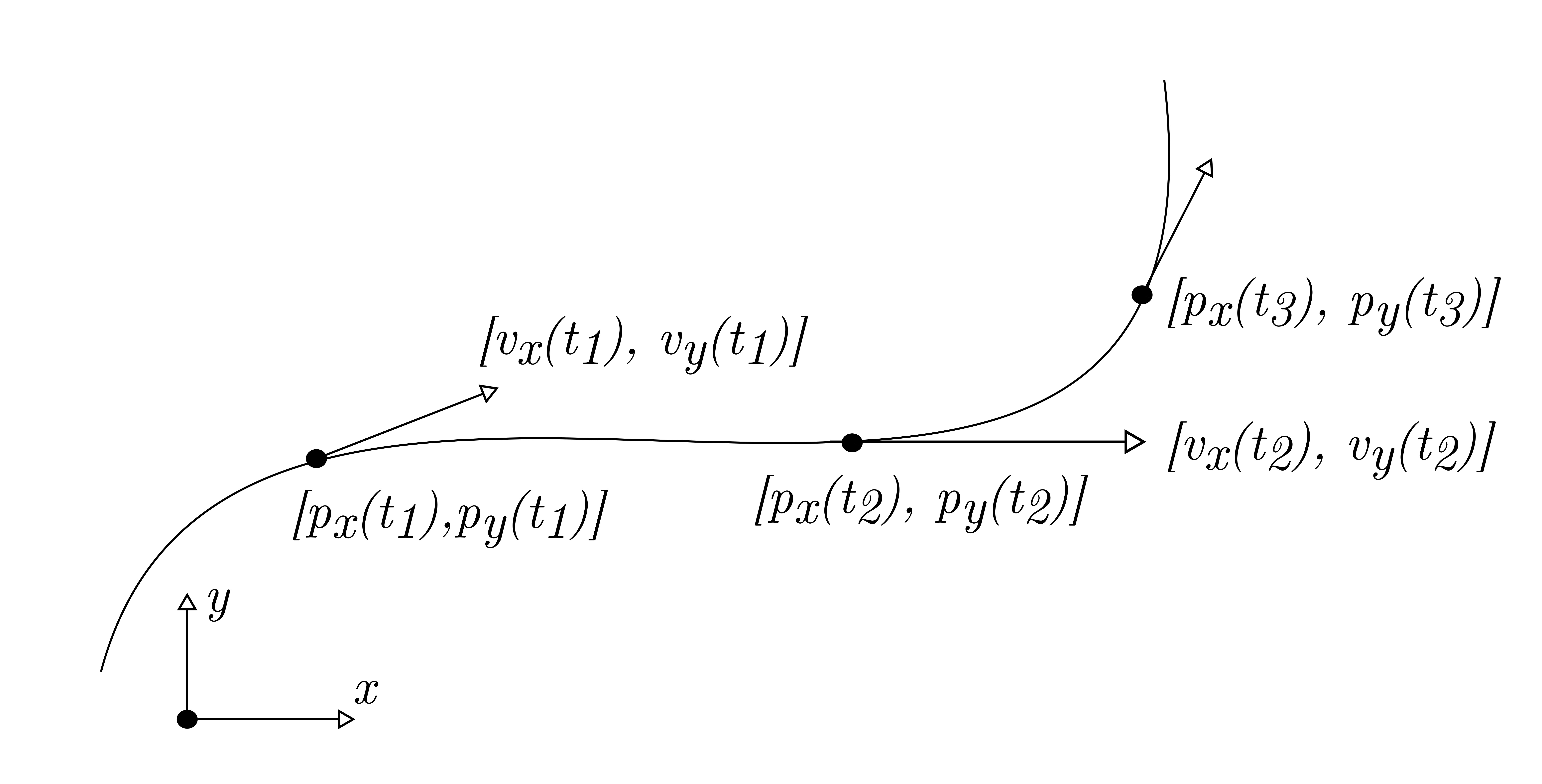
The reference trajectory is defined as a Cubic Hermite spline. The points defining the spline must be given as a set of five numbers [ti, px(ti), py(ti), vx(ti), vy(ti)], where ti is the absolute time in nanoseconds of the trajectory point, [px, py] is the position vector (meters) and [vx, vy] is the velocity vector (m/s). The driving surface bounds are 0.0m < px < 4.5m and 0.0m < py < 4.0m.
The time between trajectory points t(i+1) - t(i) is not fixed, but should be between 100 ms and 500 ms. Due to network latency and the controller structure, the trajectory points need to be created and sent ahead of time. The exact required lead time is TBD, but 1000 ms should be enough.
...
Overview
Content Tools