Page History
...
The Matlab function detectCheckerboardPoints is used to determine a list of matching points (x_floor, y_floor, x_image, y_image). Then a 5th order 2D polynomial is fitted to the data using linear least squares.
| Anchor | ||||
|---|---|---|---|---|
|
...
The vehicle pose has the format (x, y, yaw). The yaw is the rotation angle in radians of the vehicle around the vertical axis in the counter-clockwise direction. When yaw=0, the vehicle points in the x-direction. The coordinates (x, y) give the location of the vehicle's reference point. The reference point is defined as the geometric center between the front and rear axle.
To accurately implement this definition of the pose, another measurement and calibration procedure is performed. First we need a means to accurately place the vehicle on the floor, such that the true pose is known. The vehicle is clamped into a piece of wood, which extends the vehicle's local x/y coordinate system. This makes it simple to manually align the vehicle with the checkerboard pattern.
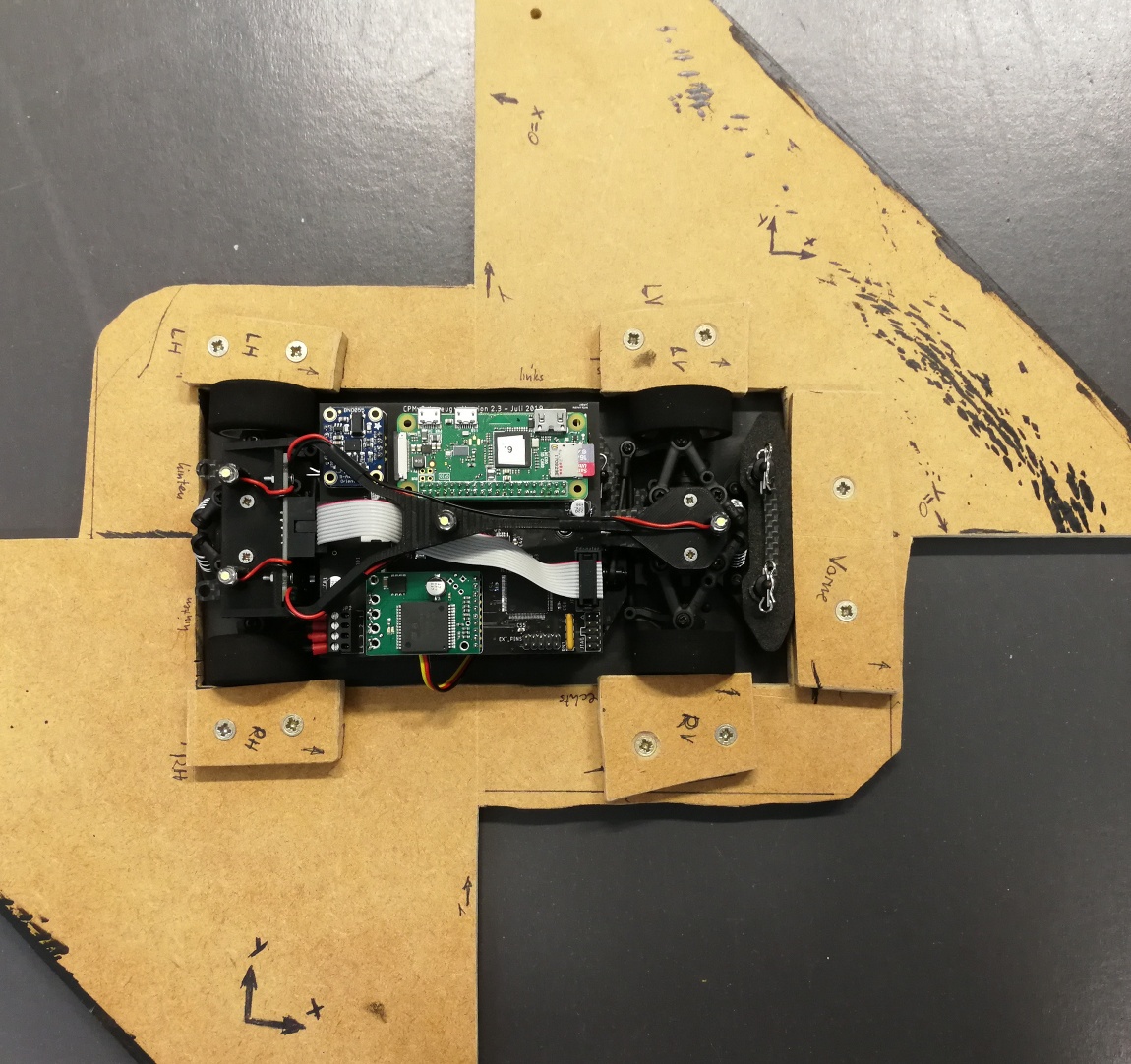
TODO explain calibration jig
...
Overview
Content Tools