Page History
...
In this documentation we show you how to setup your environement for simulation only as well as for a full scale setup. We provide tutorials to get into our software quickly. You can also have a deeper look into special topics which we present in References In-Depth Tutorials.
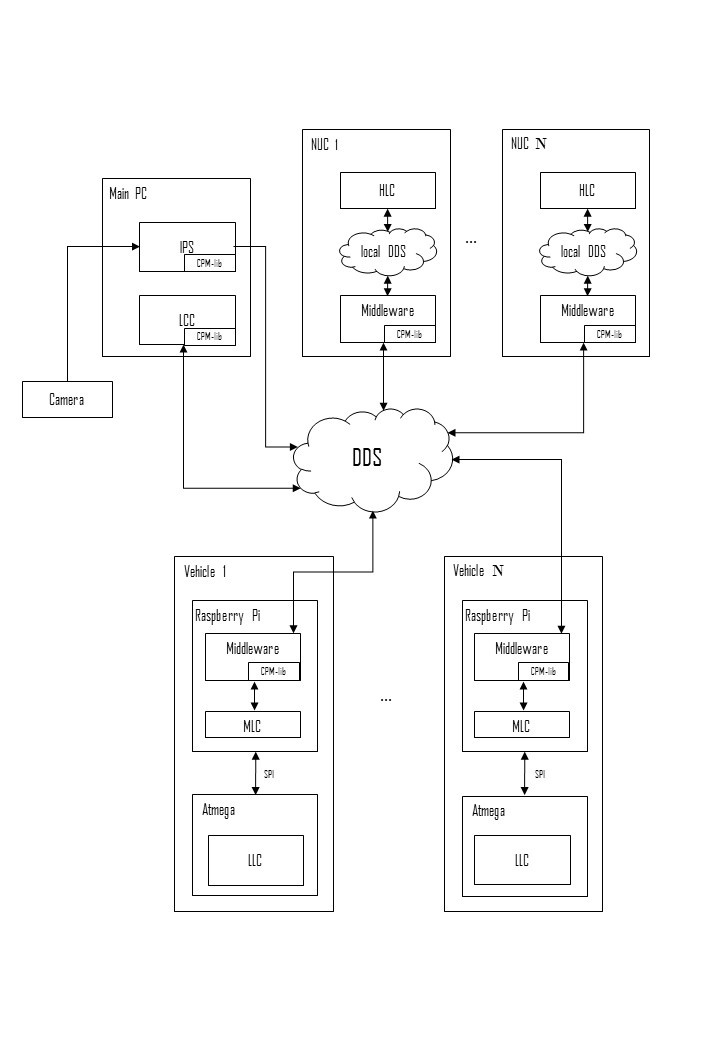
As you can see in the picture the Lab consists of the Master PC which provides the access to the infrastructure. It processes information from the Indoor Positioning System (IPS) and information from our user interface called the Lab Control Center (LCC). You can upload your program in the LCC which will send the commands to the vehicles Data Distribution Service (DDS) of the RTI Connext which works similar to a cloud system by providing all information to all members of the service. All vehicles and NUCs participate in the DDS as well. The NUCs process the commands and execute your program. In each NUC a local DDS provides the information with the middleware. Once all data is evaluated it is shared with the central DDS and sent to the vehicle.
...
- The Indoor Positioning System measures the vehicle poses using a camera.
- The Lab Control Center OverviewIntroduction gives the user an overview of the current operational state of the lab.
All software componants use our CPM library (cpm-lib). The CPM-lib provides functions to communicate with the vehicle and the IPS system. You can find functions for localisation and vehicle states.
Overview
Content Tools