In this first example we show you how to write your code in C++ how to geht your code to work in the Lab Control Center. Using this example code your vehicles will drive in a circle (not attached to the map). The code also includes a possible solution to drive a figure eight (see code comments).
General Procedure to run let your vehicles drive
- Write your code in C++ or Matlab
- Compile it, if you use C++
- Upload it to the LCC (see here)
- Press "deploy"
Code description
You define the position of the target points, the speed of your vehicle for each section and the time the vehicle needs to pass a segment. In this example the target points are not connected to the map.
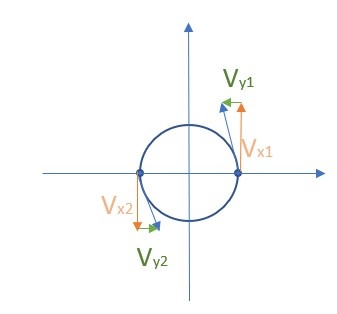
This vector defines the x position of a target point (m):
vector<double> trajectory_px = vector<double>{ 1, 0, -1, 0}This vector defines the y position of a target point (m):
vector<double> trajectory_py = vector<double>{ 0, 1, 0, -1}This vector defines the x speed to the target point. The sign gives the orientation in the cartesian coordinate system (unit (m/s)):
vector<double> trajectory_vx = vector<double>{ 0, -1, 0, 1}This vector defines the y speed to the target point. The sign gives the orientation in the cartesian coordinate system (unit (m/s)):
vector<double> trajectory_vy = vector<double>{ 1, 0, -1, 0}This vector defines the time the vehicle takes between two target points (unit ns):
vector<uint64_t> segment_duration = vector<uint64_t>{1550000000ull, 1550000000ull, 1550000000ull, 1550000000ull}In this vector we see the time for 1 m/s and a way length of pi/2 (a quater circle ;))
Advice for use:
- Speed, time and waylength have to fit. Verify your speed/way/duration with vges =s/t
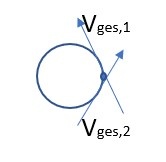
- Remember that vges = sqrt(vx^2 +vy^2) as it is a vector ((here vges,1 = vx,1,-vy,1))
|  |
|---|
- Define the vector of your current point so that the tangent will fit with the vector/tangent from the previous point
- Be aware that the shape of the curve is not only affected by the vector of the starting point but also of the vector at the end point/next starting point
- use always a speed for both dimensions (even it is only a very small value) to ensure the right tilt of your curve. → Draw your shape first and define the signs of your vectors. It turned out to be the easiest way to ensure the right orientations.
- Remember that your are giving a trajectory to a physical system so sharp edges won't be possible
C++
Circular trajectory generation for one vehicle
MATLAB
Circular trajectory generation for one vehicle
Overview
Content Tools