Page History
...
In this documentation we show you how to setup your environement environment for simulation only as well as for a full scale setup. We provide tutorials to get into our software quickly. You can also have a deeper look into special topics which we present in In-Depth Tutorials. If you have questions or feedback please let us know: cpm-support(at)embedded(dot)rwth-aachen(dot)de.
...
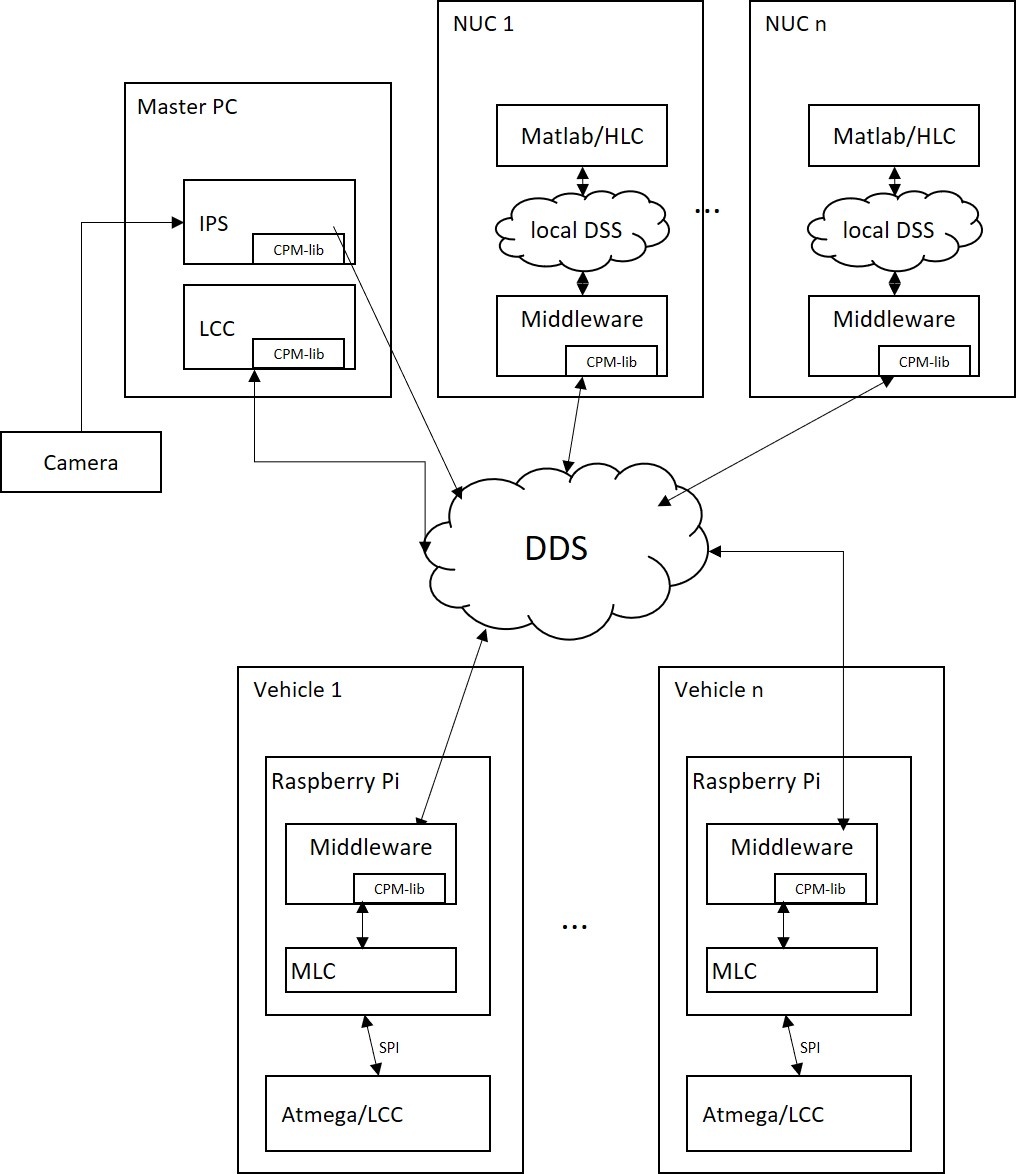
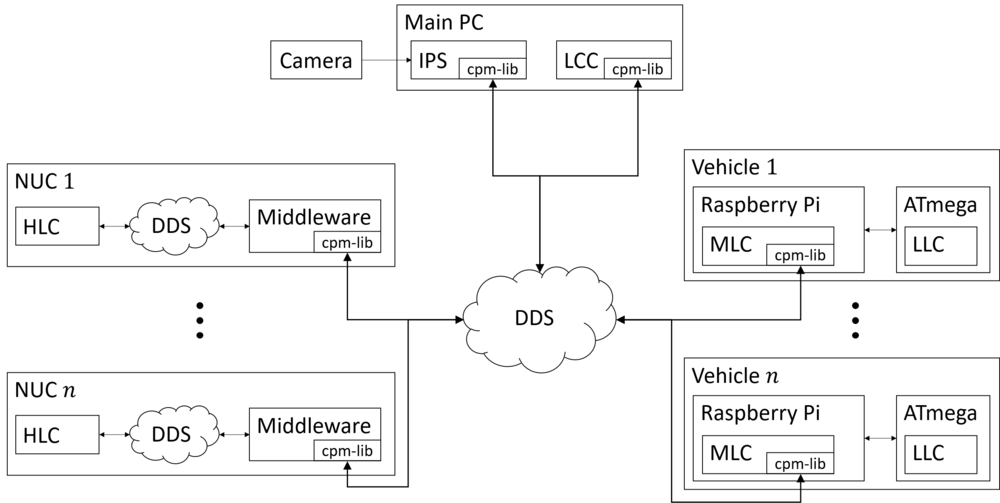
- The Indoor Positioning System measures the vehicle poses using a camera.
- The Lab Control Center Introduction gives the user an overview of the current operational state of the lab.
All software componants components use our CPM library (cpm-lib). The CPM-lib provides functions to communicate with the vehicle and the IPS system. You can find functions for localisation localization and vehicle states.
Overview
Content Tools