Page History
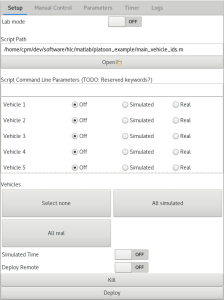
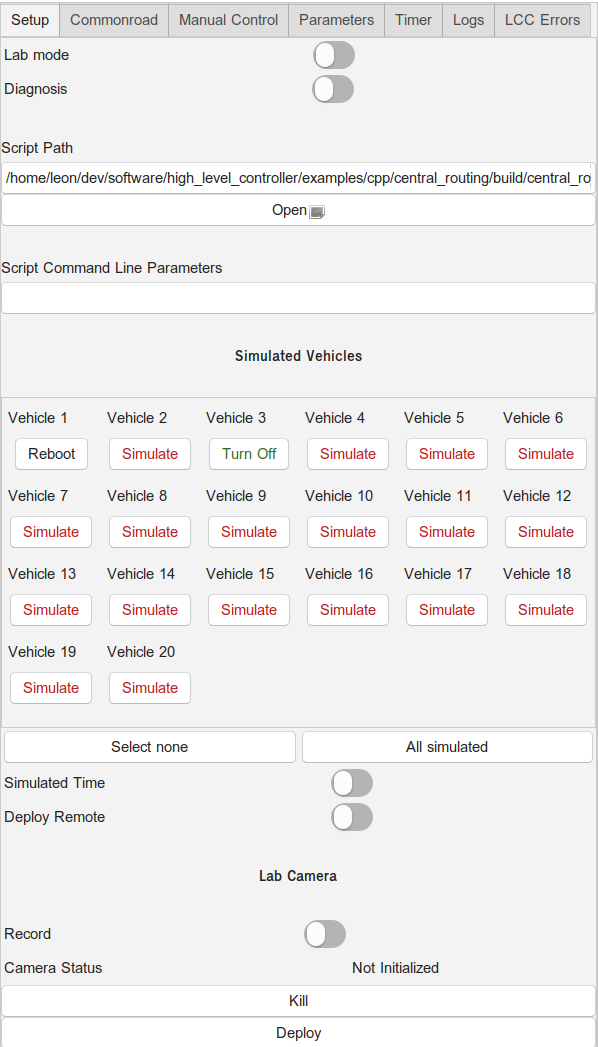
The setup view allows to launch all components required to perform a simulation from within the LCC's GUI. It can also be used for real vehicles, and to deploy your selected program or script remotely on the NUCs (HLCs).
| Info |
|---|
Deploy Remote is now called Deploy Distributed |
Selecting a Script
A single script can be selected by editing the path text field or selecting a file using the Open button. In the file chooser, you can select whether you want to use an executable or a Matlab script in a drop down menu at the bottom right of the window.
The file chooser remembers your previously selected file.
If no script is selected (empty string as script path), the LCC will only start the Middleware. You can run your script yourself outside of the LCC, connect to the Middleware and then start the simulation.
...
| C++ | Matlab |
|---|---|
| RTI DDS: (your_params, varargin) eProsima: (your_params, middleware_domain_id, varargin) |
Most of the required C++ parameters are used to set values for the cpm library. Of these parameters, you are probably only interested in the list of vehicle IDs your program is responsible for (--vehicle-ids). The same is true for the matlab script, where varargin gives you a list of vehicle IDs - any other parameters, which come beforehand, are custom.
The Middleware domain ID can currently only be set consistently in the eProsima Branch, the functionality might not be added to support RTI w.r.t. Matlab, although the change would be rather small (you can adapt your Matlab scripts accordingly), as the Lab will change to using eProsima only in the future.
Further parameters can be specified in the text field below the Open button. If you need to access these command line parameters in your C++ program, simply use the Command Line Parser and --your_param= in the text field. Custom arguments can be set by yourself this way during testing / for your simulations. Matlab custom arguments just need to be passed in a comma-separated fashion (e.g.: 1, 155, 3).
...
This option includes a lot of features, thus we created an own page for it. If this switch is set, your program gets uploaded to the NUCs / HLCs for deployment, instead of being deployed locally on your machine. One script instance handles one vehicle (ID) per NUC / HLC.
...
Overview
Content Tools