Page History
...
The IPS software has two major components, the LED detection and the IPS pipeline. The LED detection reads images from the camera at 50 Hz and extracts the list of image coordinates for all visible LEDs. These LedPoints are published via DDS. The raw images are not saved or published, as this would create impractically large data volumes. The IPS pipeline processes the LED points and publishes VehicleObservations, which include the vehicle's position, orientation, identity and a timestamp.
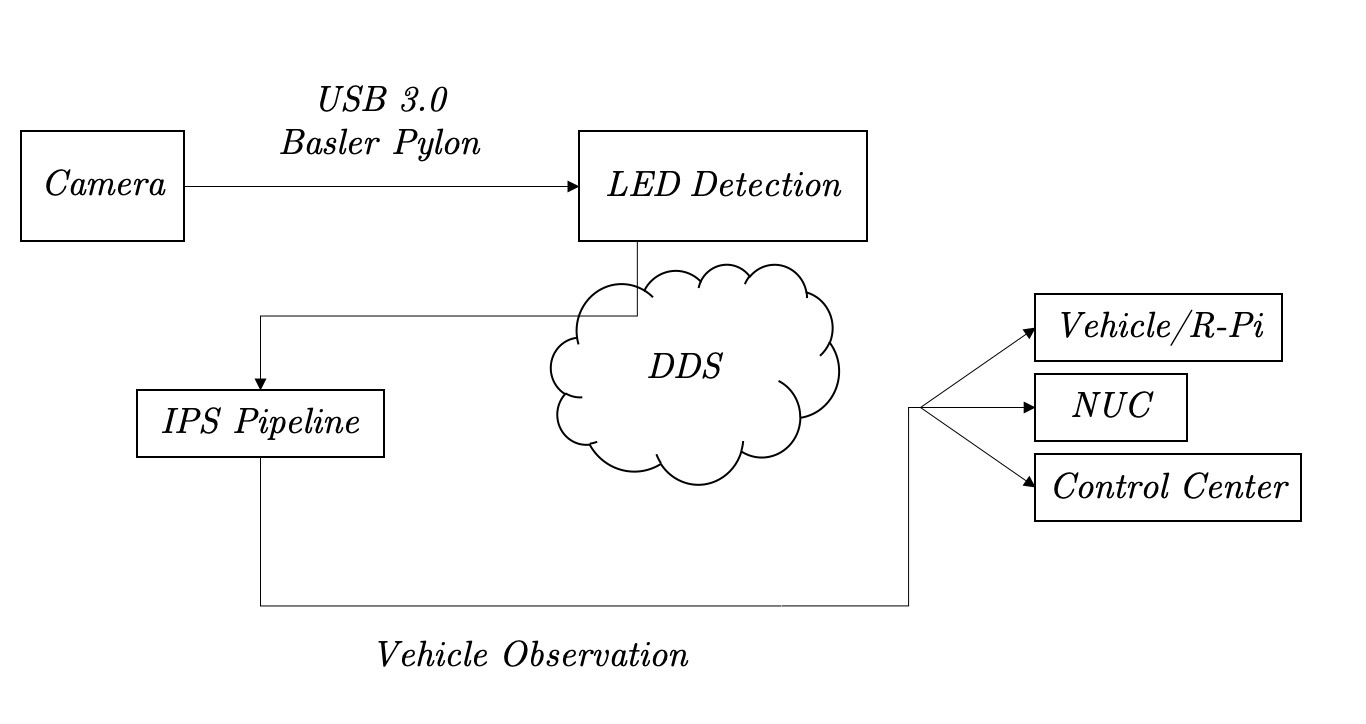
LED Detection
The LED detection uses the OpenCV functions cv::threshold and cv::findContours to find the centers of the LEDs.
IPS Pipeline
asd
Processing Pipeline
asd
...
Overview
Content Tools