Page History
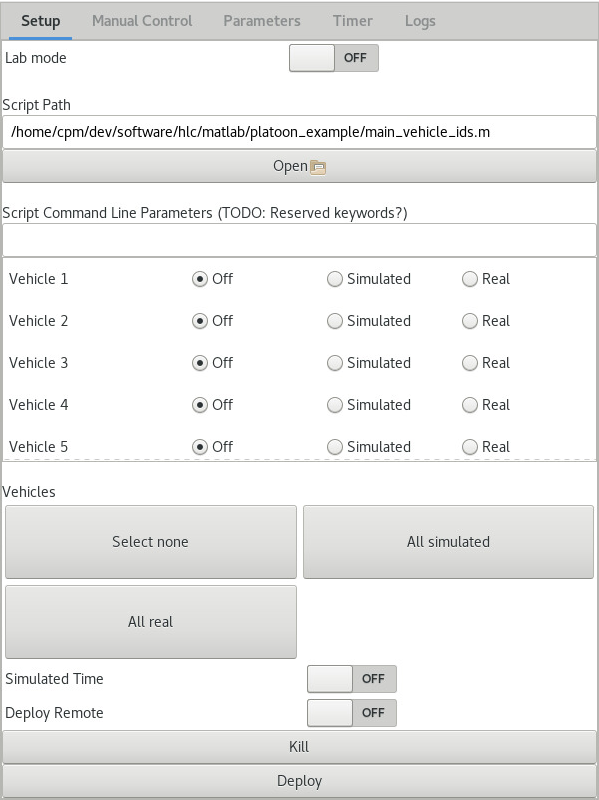
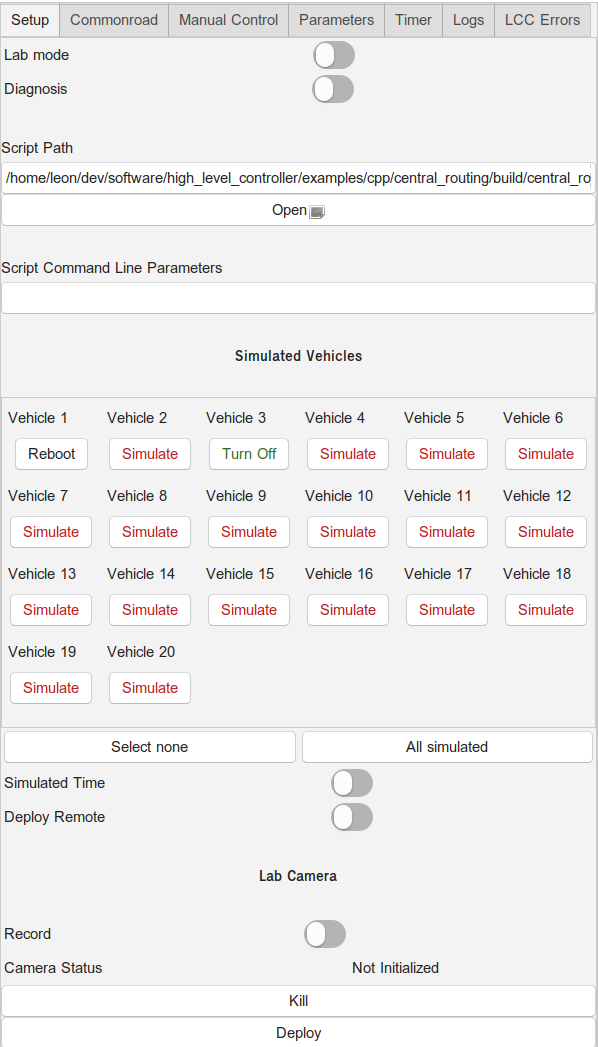
The setup view allows to launch all components required to perform a simulation from within the LCC's GUI. It can also be used for real vehicles, and to deploy your selected program or script remotely on the NUCs (HLCs).
...
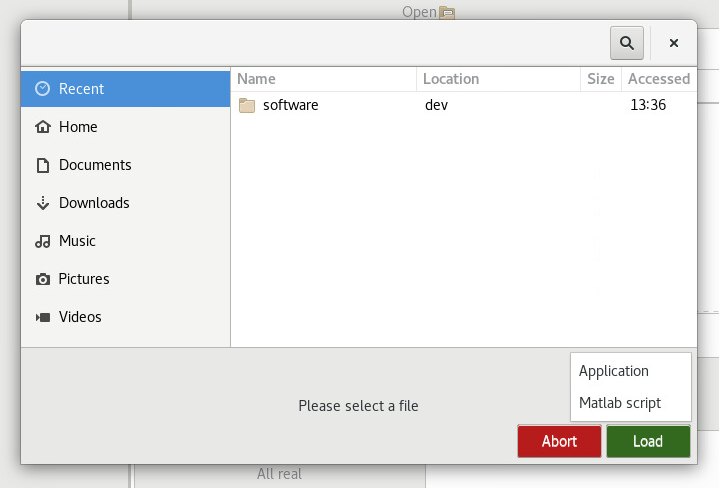
A single script can be selected by editing the path text field or selecting a file using the Open button. In the file chooser, you can select whether you want to use an executable or a Matlab script in a drop down menu at the bottom right of the window.
The file chooser remembers your previously selected file.
Required Script Properties
...
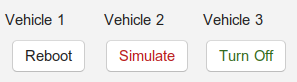
You can select, for each vehicle individually, whether they should be ignored, simulated, or if a real vehicle is used with that vehicle ID during the simulation. control their current state if they are real vehicles.
| Simulated Vehicle |
|
| Real Vehicle |
|
The buttons below the scrollable view allow you to set the state for all (non-real) vehicles at once.
Vehicles that are set to be off will be ignored by your script, as their IDs are not passed to it. You do not need to start the simulated vehicles - the LCC does that for you immediately after selection. They are killed when the simulation LCC is stopped closed or when another mode (real or off) is chosen.
| Info | ||
|---|---|---|
| ||
If you have not started the LCC with the correct parameters (e.g. use the main server DDS domain), you might not be able to connect to / see the real vehicles. |
Simulated Time
...
Overview
Content Tools