Page History
...
To accurately implement this definition of the pose, another measurement and calibration procedure is performed. First we need a means of accurately placing the vehicle on the floor, such that the true pose is known. The vehicle is clamped into a piece of wood, which extends the vehicle's local x/y coordinate system. This makes it simple to manually align the vehicle with the checkerboard pattern.
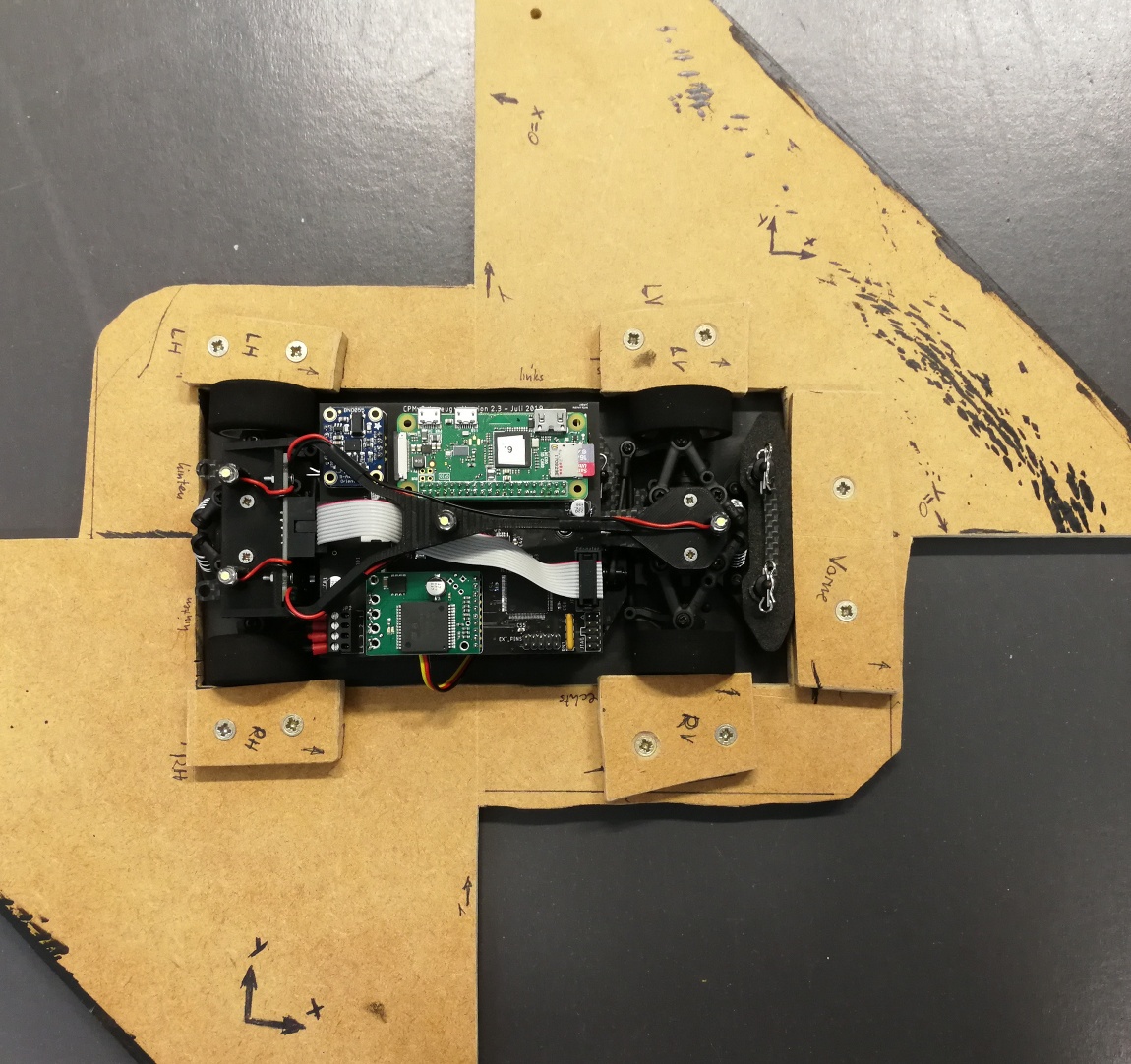 TODO explain calibration jig
TODO explain calibration jig
While the IPS is running, the vehicle is placed in various poses on the floor, following a particular calibration sequence. The calibration features (back_x, back_y, direction_x, direction_y) are recorded from the running IPS.
Overview
Content Tools