Page History
...
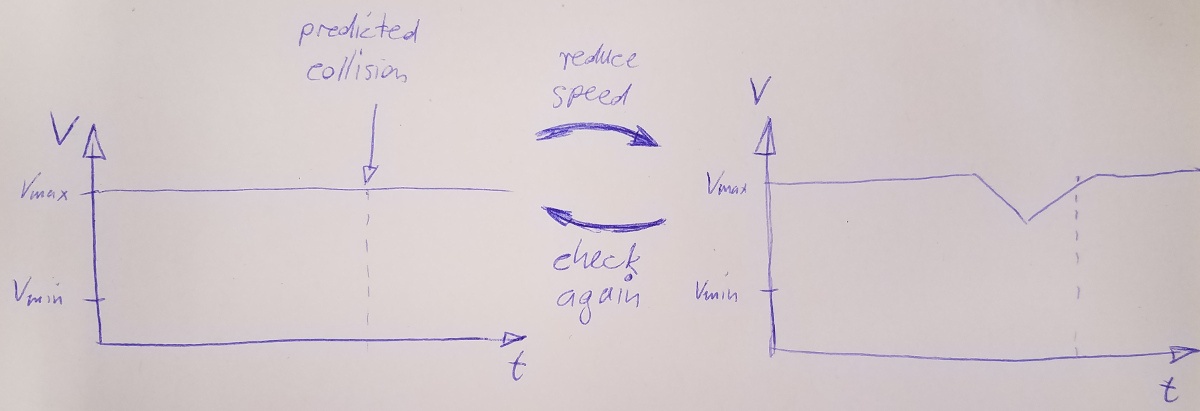
The collision avoidance is based on a vehicle reducing its speed before a potential collision. By default, all vehicles plan to drive with a given maximum speed. When a collision is predicted, the vehicle with ther greater ID reduces its planned speed (in the speed profile) a little prior to the collision. This process is repeated until all predicted collisions are resolved. If it is not possible to resolve all collisions, the program stops. The speed is increased and decrease in small increments, to follow the maximum acceleration. As a result, vehicle 1 never slows down. Vehicle 2 slows to avoid vehicle 1. Vehicle 3 slows to avoid vehicles 1 and 2, and so on. This is a priority based collision avoidance.
Sources:
Priorities https://git.rwth-aachen.de/CPM/Project/Lab/software/blob/d48cf9c589cd8375b7ea147d7931ed0f29650278/central_routing_example/src/MultiVehicleTrajectoryPlanner.cpp#L49
Collision prediction https://git.rwth-aachen.de/CPM/Project/Lab/software/blob/d48cf9c589cd8375b7ea147d7931ed0f29650278/central_routing_example/src/VehicleTrajectoryPlanningState.cpp#L121
Speed reduction https://git.rwth-aachen.de/CPM/Project/Lab/software/blob/d48cf9c589cd8375b7ea147d7931ed0f29650278/central_routing_example/src/VehicleTrajectoryPlanningState.cpp#L162
...
Overview
Content Tools