There are two ways to control CPM vehicles, direct commands and trajectory commands.
Direct Command
The direct command uses dimensionless, uncalibrated inputs and applies them directly to the motor and servo.
| motor_throttle | steering_servo | |
|---|---|---|
| -1.0 | Maximum reverse acceleration | Full right |
| 0.0 | Brake, stop | Steering roughly centered, but may have an offset |
| +1.0 | Maximum forward acceleration | Full left |
struct VehicleCommandDirect
{
octet vehicle_id; //@key
Header header;
double motor_throttle; // dimensionless, in [-1, 1]
double steering_servo; // dimensionless, in [-1, 1]
};Trajectory Command
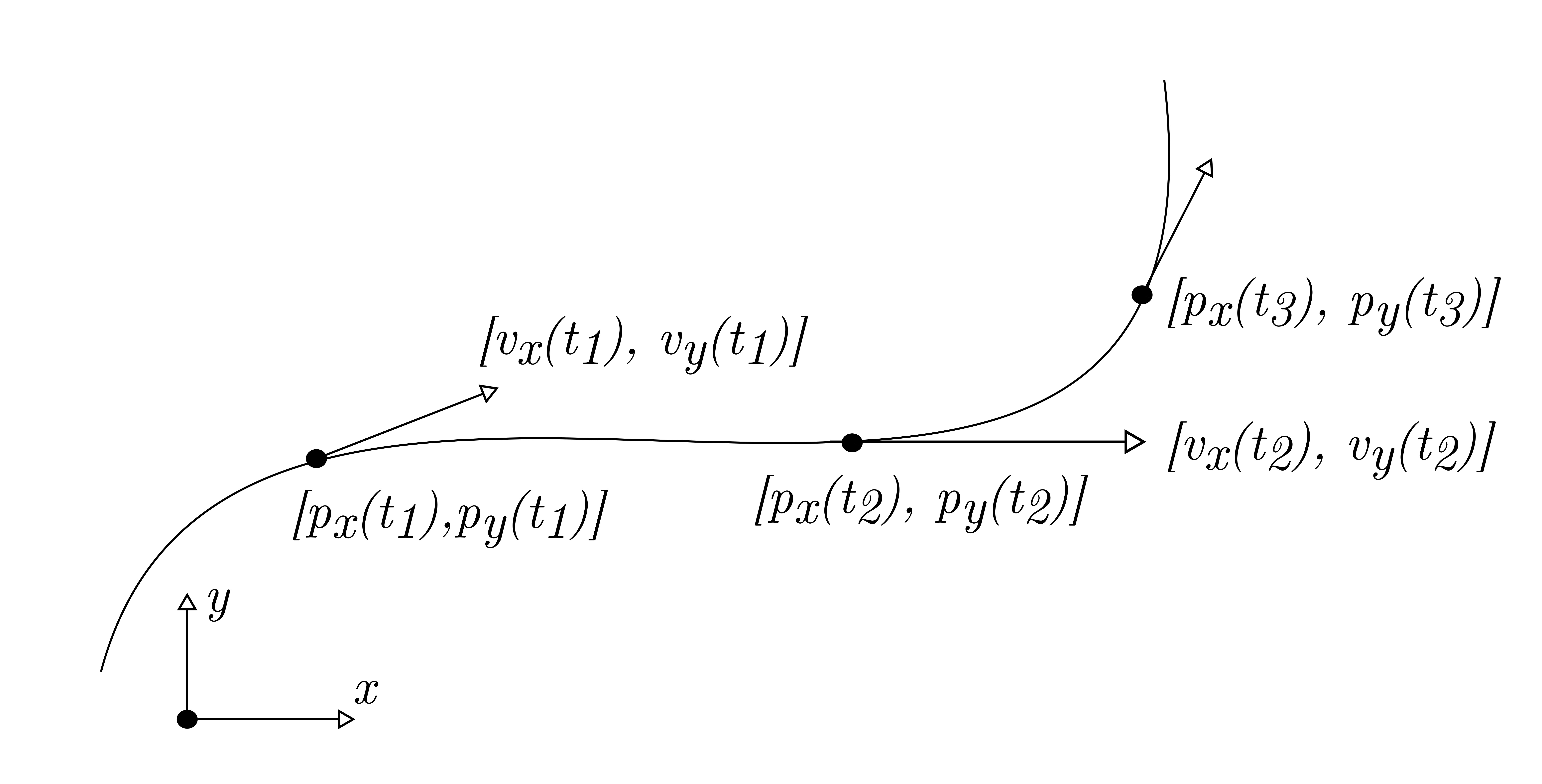
The reference trajectory is defined as a Cubic Hermite spline. A spline is a function that is defined piecewise in time. Thus it can be extended in real time, which (metaphorically) looks like this:

The points defining the spline must be given as a set of five numbers [ti, px(ti), py(ti), vx(ti), vy(ti)], where ti is the absolute time in nanoseconds of the trajectory point, [px, py] is the position vector (meters) and [vx, vy] is the velocity vector (m/s). The driving surface bounds are 0.0m < px < 4.5m and 0.0m < py < 4.0m.
The time between trajectory points t(i+1) - t(i) is not fixed, but should be between 100 ms and 400 ms. Due to network latency and the controller structure, the trajectory points need to be created and sent ahead of time. The exact required lead time is TBD, but 1000 ms should be enough.
The reference trajectory is a function of continuous time. Thus it also implicitly defines other kinematic quantities, such as yaw, yaw rate, curvature, acceleration and jerk, for any point in time. The user must ensure that the reference trajectory is within the limits of the vehicle's capabilities. The curvature should be less than 3/m ("three per meter"), and the acceleration should be less than 5 m/s². If these limits are significantly exceeded, the trajectory controller will deactivate and stop the vehicle.
When first taking control of the vehicle using a reference trajectory, the reference trajectory must be consistent with the current position and orientation of the vehicle. Small deviations (~0.5m, ~30 degrees) are allowed. For large deviations the trajectory controller will deactivate and stop the vehicle.
Overview
Content Tools