The Indoor Positioning System detects the position, orientation and identity of multiple vehicles simultaneously. The position and orientation are updated at 50 Hz.
Optics
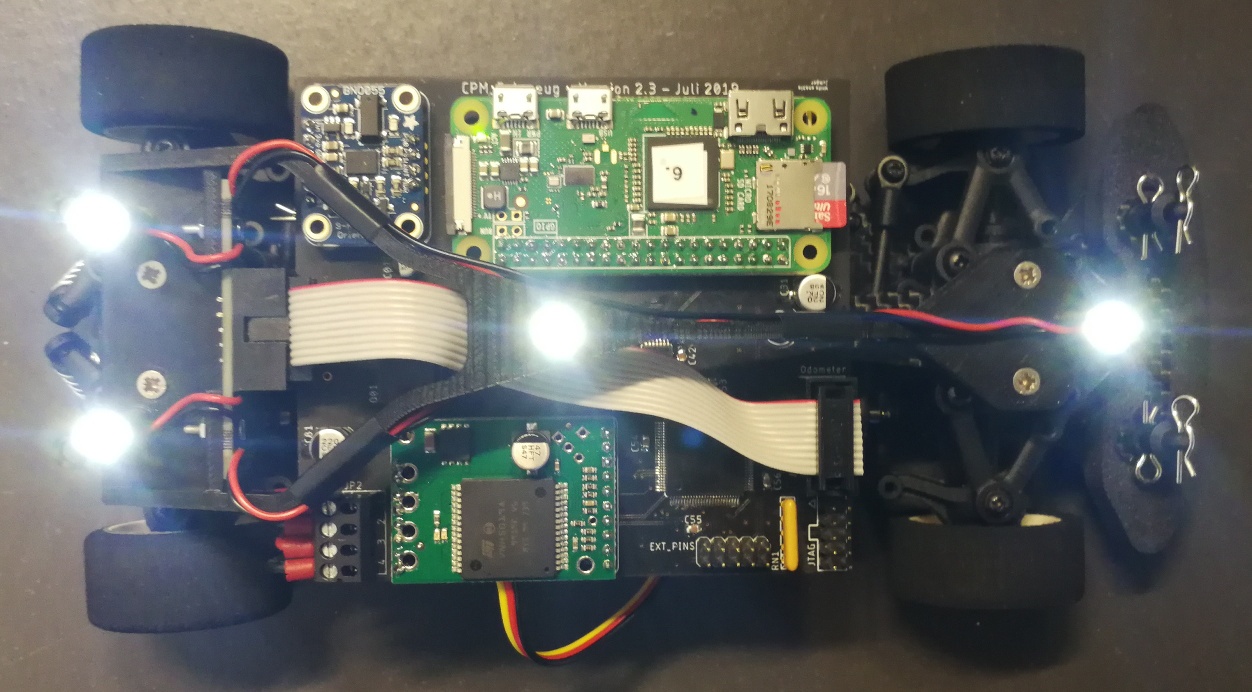
The Indoor Positioning System works with active light sources (LEDs) on the vehicles and a camera looking down from the ceiling. The LEDs are detected based on their high brightness. The camera is set to a very short exposure (~100 microseconds). Thus, the ambient light creates a very small signal (almost black), while the LEDs still appear as white dots. The short exposure time also eliminates the problem of motion blur. At a top speed of 4 m/s the vehicle travels 0.4 mm during the exposure.
Other light sources and reflective surfaces on the vehicle can create false signals and must be covered with tape. This includes the connectors on the Raspberry Pi and the status LEDs on the motor speed controller.
Vehicle Pose
The outer three LEDs indicate the vehicle pose and are permanently illuminated.
TODO explain calibration jig
Vehicle Identification
The central LED flashes in a pattern that is different for each vehicle.
asd
| Vehicle ID | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| Period of flashing, in number of frames | 4 | 7 | 10 | 13 | 16 | 7 | 10 | 13 | 16 | 19 | 10 | 13 | 16 | 19 | 22 | 13 | 16 | 19 | 22 | 25 | 16 | 19 | 22 | 25 | 28 |
| LED illumination duration, in number of frames | 2 | 2 | 2 | 2 | 2 | 5 | 5 | 5 | 5 | 5 | 8 | 8 | 8 | 8 | 8 | 11 | 11 | 11 | 11 | 11 | 14 | 14 | 14 | 14 | 14 |
asd
Processing Pipeline
asd
Overview
Content Tools