Vehicle
The map on the upper left view depicts the vehicle's positions and orientations, a "trail" of past positions (red), the commanded reference trajectory (blue), and the MPC's predicted trajectory (pink).
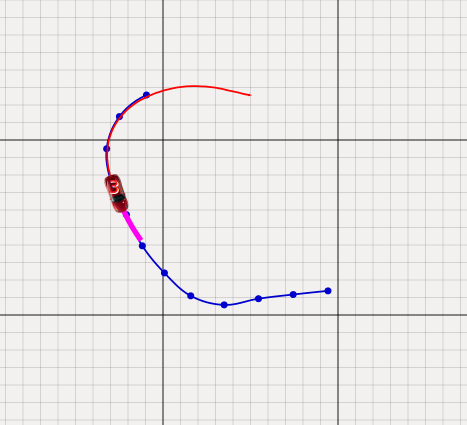
By sending DDS visualization messages, elements can be dynamically added to the map view.
A vehicle can be controlled in a semi-automated fashion, by clicking and dragging to draw a reference trajectory. This only works when the vehicle is within the view of the IPS.
Commonroad Scenario
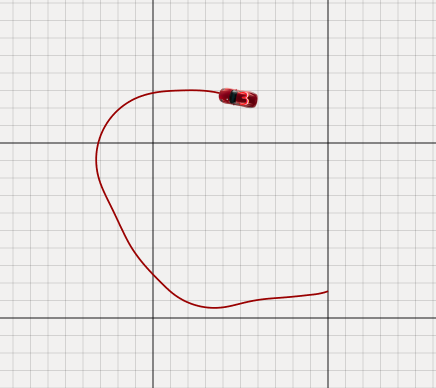
The map can also show data of a loaded commonroad scenario - lanelets, obstacles etc. Some of the information are also shown in the Commonroad Tab, which can also be used to load a specific scenario.
You can see an example of a simulation in the Gif shown above. Vehicle 4 was chosen to be represented by a real vehicle, so upon starting the scenario, the vehicle is replaced by a trajectory that is sent within the network. You can find out more about this in Commonroad Tab.
Overview
Content Tools