Page History
...
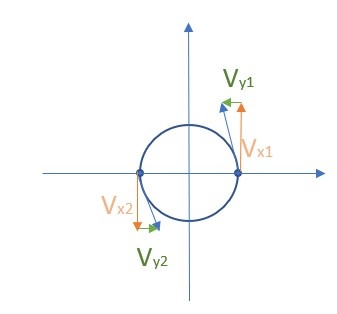
- Speed, time and waylength have to fit. Verify your speed/way/duration with vges =s/t
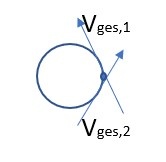
- Remember that vges = sqrt(vx^2 +vy^2) as it is a vector ((here vges,1 = vx,1,-vy,1))
|
|---|
...
 |
|---|
- Define the vector of the startpoint and the endpoint have to fit (means the tangent has to fit)
...
- your current point so that the tangent will fit with the vector/tangent from the previous point
- Be aware that the shape of the curve is not only affected by the vector of the starting point but also of the vector at the end point/next starting point
- use always a speed for both dimensions (even it is only a very small value) to ensure the right tilt of your curve. → Draw your shape first and define the signs of your vectors. It turned out to be the easiest way to ensure the right orientations.
- Remember that your are giving a trajectory to a physical system so sharp edges won't be possible
C++
Circular trajectory generation for one vehicle
...
Overview
Content Tools