Page History
...
Define four points of your circle on a coordinate system.
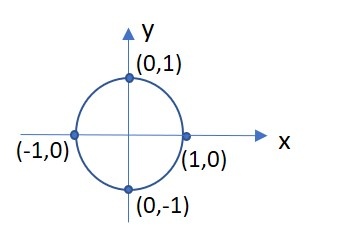
Define the speed vector of the vehicle for each point for the entire trajectory. When you define v_x and v_y remember that vges = sqrt(vx^2 +vy^2) (as it is a vector). You use this vector to define the direction for your vehicle, so where it has to steer next. Always assign at least a small value to both vectors to ensure the correct direction. Remember that your are defining a physical system, so avoid sharp edges.
Draw the vecotrs on each point of your trajectory:

Now implement your points and speed values using the predefined vetors trajectory_px and trajectory_py for your points of the trajectory and trajectory_vx and trajectory_vy for the speed at each point. The speed is given in m/s. Set the center of the circle to the center of the map at x =2,25m and y= 2m.
...
Overview
Content Tools