Page History
...
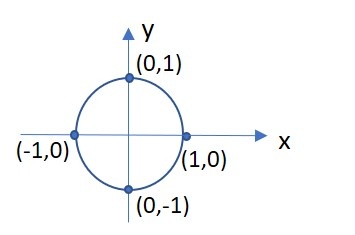
Define four points of your circle on a coordinate system.
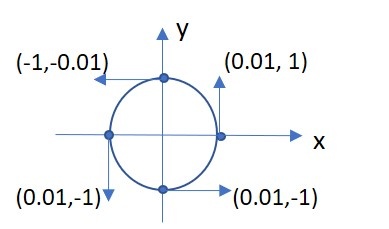
Define the speed vector of the vehicle for each point for the entire trajectory. When you define v_x and v_y remember that vges = sqrt(vx^2 +vy^2) (as it is a vector). You use this vector to define the direction for your vehicle, so where it has to steer next. Always assign at least a small value to both vectors to ensure the correct direction. Remember that your are defining a physical system, so avoid sharp edges.
Draw the vecotrs on each point of your trajectory:
Now implement your points and speed values using the predefined vetors trajectory_px and trajectory_py for your points of the trajectory and trajectory_vx and trajectory_vy for the speed at each point. The speed is given in m/s. Set the center of the circle to the center of the map at x =2,25m and y= 2m.
...
All data are sent to the vehicle using the writer-function from the beginning in the form of
point_x_position;
point_y_position;
velocity_x_direction;
velocity_y_direction;
timestamp
where each value is a scalar.
Run the example
- Compile your code.
- Upload it in the LCC.
- Select vehicle 4 (simulated mode).
- Hit "Deploy". You will see a trail which builds and erases from point to point. This is your trajectory. Now move the simulated vehicle close to the trajectory by dragging it to a close point to the circle trajectory. A second trail will be drawn which is the trajectory for your vehicle to get the circle trajectory.
- Once the vehicle is on the circle trajectory it will drive continously in endless loop.
- To end the program hit "Kill".
...
Overview
Content Tools