Defining Initial Parameters for the Participants
Initial parameters can be defined using the parameters.yaml - file. For most parameters, there is yet no convention regarding their name and types, so please contact someone responsible for the LCC if this part of the documentation has not been updated yet.
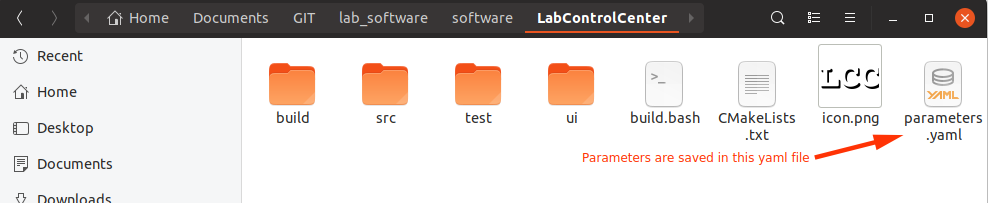
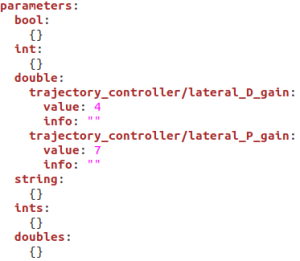
The parameters are stored in the YAML format in the file parameters.yaml in the directory of the LCC. Some parameters are distributed on program startup, these must be either edited in the LCC before restarting it, or they can be edited manually by changing the content of the YAML file:
Six different parameter types can be defined - bool, integer, double and string as well as comma-separated lists of integers and doubles. The parameters consist of a name (e.g. trajectory_controller/lateral_D_gain), a value (or set of values) and an information string that can be used to describe the purpose of the parameter.
Precision of Doubles
Doubles are currently stored and loaded with a precision of up to 3 decimal places.
Setting Parameters in the GUI
|
|
|
|---|

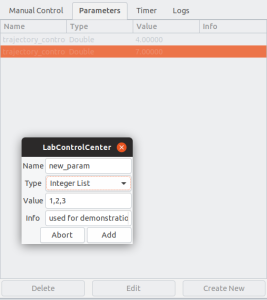
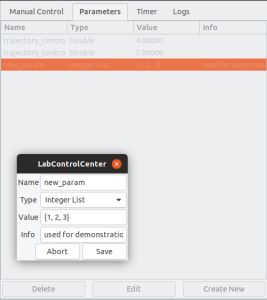
Parameters are shown in the LCC UI in the parameters tab. This UI simplifies the editing process of the available parameters - they can be deleted or changed, and new parameters can be created as well using the UI tools. Thus, if desired, the YAML file does not need to be used explicitly.
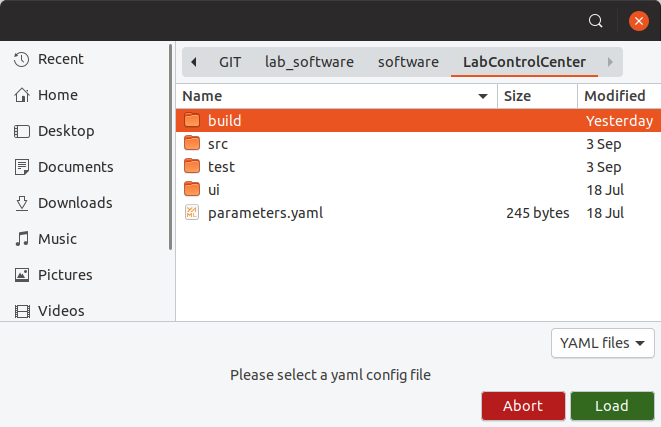
The LCC can use different YAML files as well. A file chooser has been implemented to load and save parameter configurations (to / from YAML files).
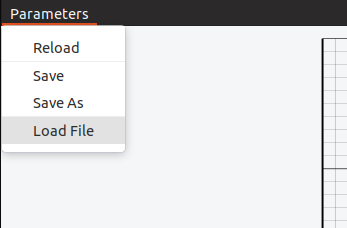
Save can be used to store the current configuration in the current file.
Save As can be used to store the current configuration in a new file.
Reload can be used to reload the currently selected file - this overwrites any unsaved changes made in between.
Load can be used to load a new file.
Overview
Content Tools