A Vision-Based Real-Time Indoor Positioning System for Multiple Vehicles
Our indoor positioning system determines the poses (position and orientations) and IDs of our
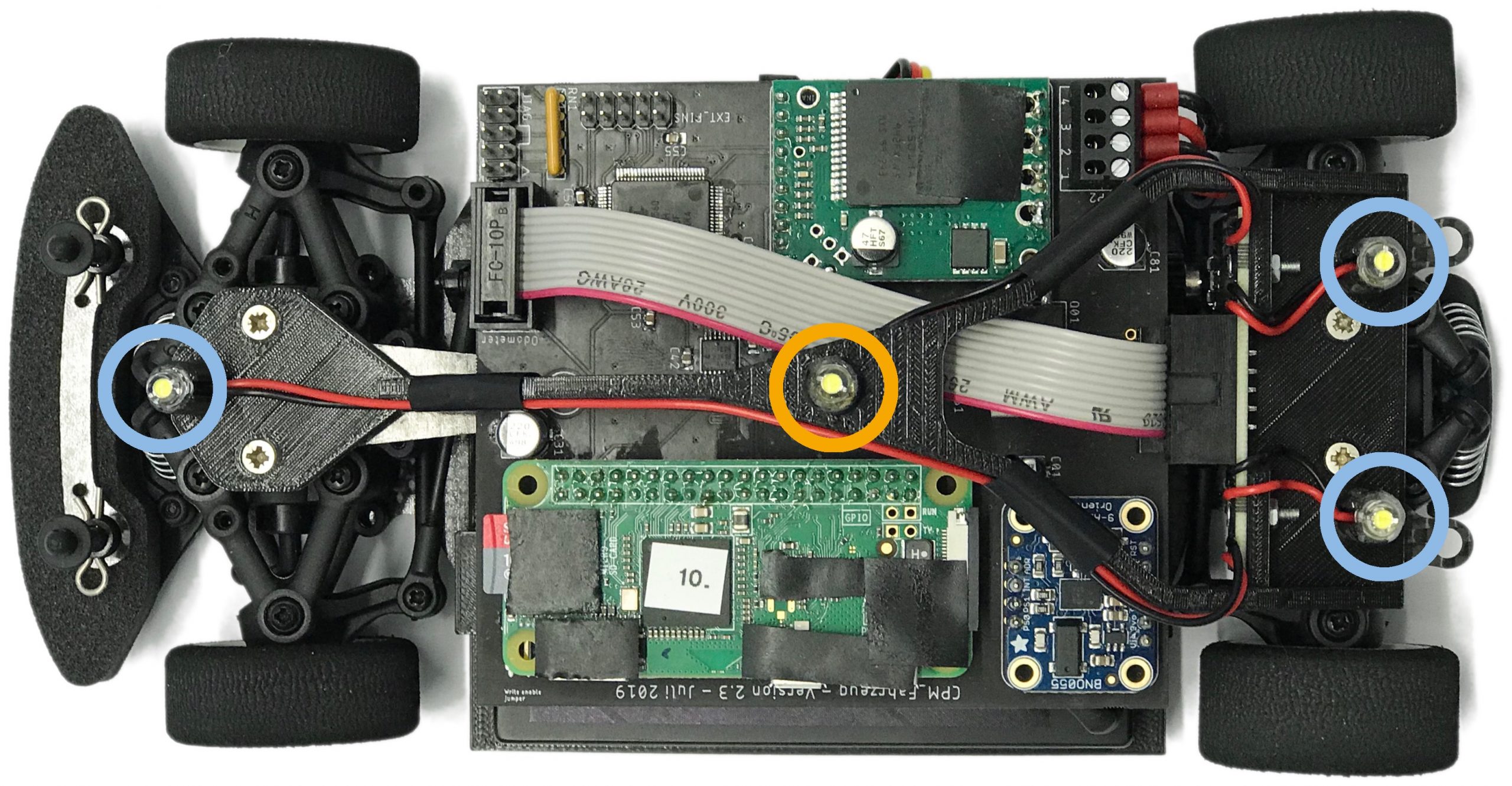
μCars. A
Basler camera mounted at a height of 3.3 m detects four LEDs attached to each vehicle using image processing. The figure shows those four LEDs. The outer LEDs marked with a blue circle serve the purpose of determining the vehicle’s pose. The inner LED marked with an orange circle transmits the vehicle’s ID by flashing in a defined frequency.
This setup reaches an accuracy of about 1.1 cm for the position and around 0.6° for the orientation in the mean. Our system is real-time capable of detecting 20 vehicles with a soft deadline of 20 ms. It is robust against changing lighting conditions and reflections.
Details on the setup of the indoor positioning system can be found in our
documentation.