A Networked and Autonomous Model-scale Vehicle for Experiments in Research and Education
The µCars are networked and autonomous model-scale vehicles with Ackermann steering geometry developed for experiments in research and education. The vehicle is open source, moderately costed and highly flexible, which allows for many applications. It is equipped with an inertial measurement unit and an odometer and obtains its pose (position and orientation) via WLAN from an indoor positioning system.
The two supported operating modes for controlling the vehicle are (1) computing control inputs on external hardware, transmitting them via WLAN and applying received inputs to the actuators and (2) transmitting a reference trajectory via WLAN, which is then followed by a controller running on the onboard Raspberry Pi Zero W.
The design allows identical vehicles to be used at the same time in order to conduct experiments with a large amount of networked agents. In our lab, we currently provide 20 vehicles for networked experiments.
Hardware
We use the mechanical components from the XRAY M18 PRO LiPo. It is a 1:18 model-scale vehicle with a length of 220 mm, a width of 107 mm, a height of 70 mm and a wheelbase of 150 mm. The fully equipped vehicle weighs 500 g and has a maximum speed of 3.7 m/s. An example for a true-scale vehicle with similar geometric dimensions after scaling up is the VW Golf VII.
The power consumption in standby (without steering or acceleration) is 250 mW. In experiments, the battery powers the vehicle for about five hours. The minimum turning radius given by the mechanical design is approximately 0.3 m.
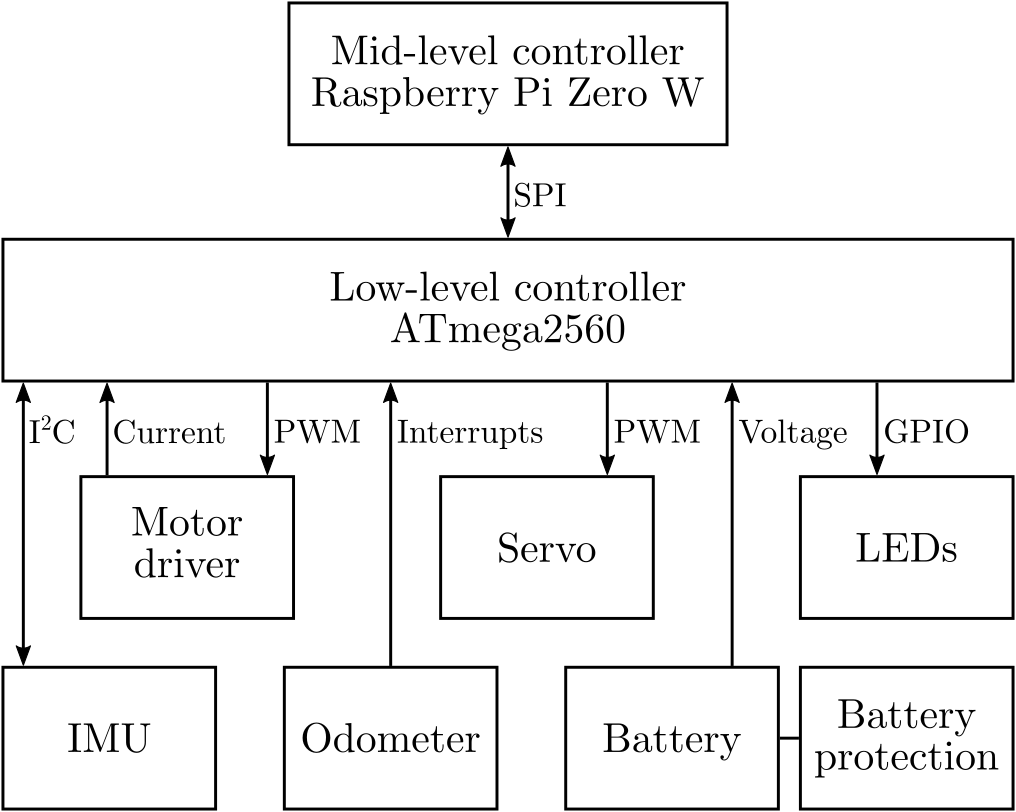
The mid- and low-level controllers of the lab architecture define two layers of the vehicle’s hardware architecture as shown in the figure. Most of the electrical components are off-the-shelf hardware components. Some are designed by us, such as the PCB or the odometer. Details on how to build the vehicles can be found in our documentation.