

News

Best Associate Editor
Bassam Alrifaee was awarded the Best Associate Editor Award for IEEE Transactions on Intelligent Vehicles in 2023!
Autonomy Talk at ETH Zurich
Explore strategies for decision-making in cyber-physical mobility systems, watch now.

Workshop on Small-Scale Testbeds at IEEE IV 2024
Network with experts and get your research published in the IV proceedings, learn more.

2nd CPM Olympics
Excited about motion planning challenges? Check out our 2nd CPM Olympics with a total prize pool of €6,000!
Young Research Award 2023 of ITSS Germany
Patrick Scheffe received the award for his research in the CPM Lab, in particular for our paper available on IEEE Xplore and ResearchGate.
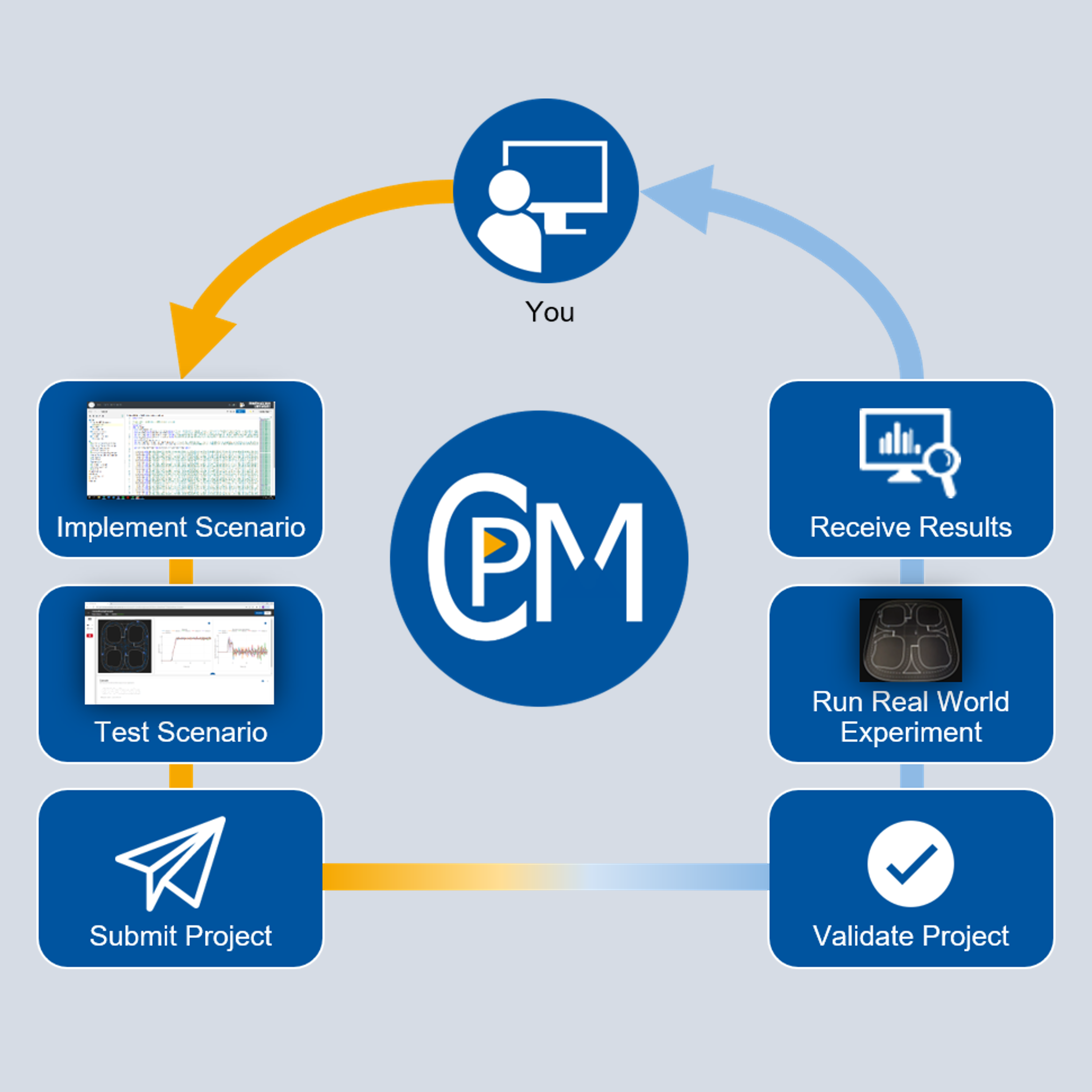
CPM Lab has a Remote Access
We care about accessibility! Explore the features of our CPM Remote.

150th Anniversary of RWTH Aachen University
We had the honor to contribute to the celebration movie on YouTube.
Explore the Cyber-Physical Mobility Lab

Main Computer
The main computer is the primary operation device and runs the Lab Control Center (LCC). The LCC sets up experiments. The main computer also runs the camera-based indoor positioning system.
Computing Unit
In order to enable rapid functional prototyping, we provide external computational entities to each vehicle. Read more about rapid functional prototyping in the CPM Lab in our architecture.
Camera
The lab camera and four LEDs on each vehicle form the indoor positioning system. The system processes images of the vehicles’ LEDs and detects each vehicle’s ID, position, and orientation.
MicroCar
The 20 networked
model-scale vehicles (µCars) have a scale of 1:18, 220 x 107 x 70 mm (length x width x height), and a maximum speed of 3.7 m/s. They host the
low- and mid-level controllers.
Map
The map has a drivable curvature, which considers the vehicles’ dynamics. The digital representation of the map is used in
high-level algorithms. The physical map can be easily exchanged.
Router
The lab router establishes the communications between the vehicles and the main computer and the computation units. A
DDS-based middleware organizes the data communications in the CPM Lab.
Presenting: The CPM Group and Lab
Funding
We thank the following programs for providing funds to the CPM Lab
DFG MOBILEM
The DFG Research Training Group “Integrated Energy Supply Modules for Roadbound E-Mobility”
CITI
The project CiTi – Center for integrative Traffic investigation
DH.NRW
The fund “digital teaching and learning infrastructure” of the state NRW
RWTH Aachen
The quality improvement funds at RWTH Aachen University
ETS
The exploratory teaching space of RWTH Aachen University