Control and Perception in Networked and Autonomous Vehicles
We offer this course since the winter term 2019/2020. We designed it for master’s students of Computer Science, Automation Engineering, and Computational Engineering Science. It combines theory with practical exercises in the CPM Lab. Click on ‘READ MORE’ to download the course materials and watch the lecture videos.
Networked Model Predictive Control for Multi-Vehicle Decision-Making
We offered this PhD course in the context of the International Graduate School on Control (IGSC) of the European Embedded Control Institute (EECI) in 2021. The course combines theory with practical exercises in the CPM Lab. Click on ‘READ MORE’ to download the course materials and watch the lecture videos.

Practical Course
For bachelor’s students, we offer a practical course called CPM Academy since the winter term 2019/2020.
Team Galaxis
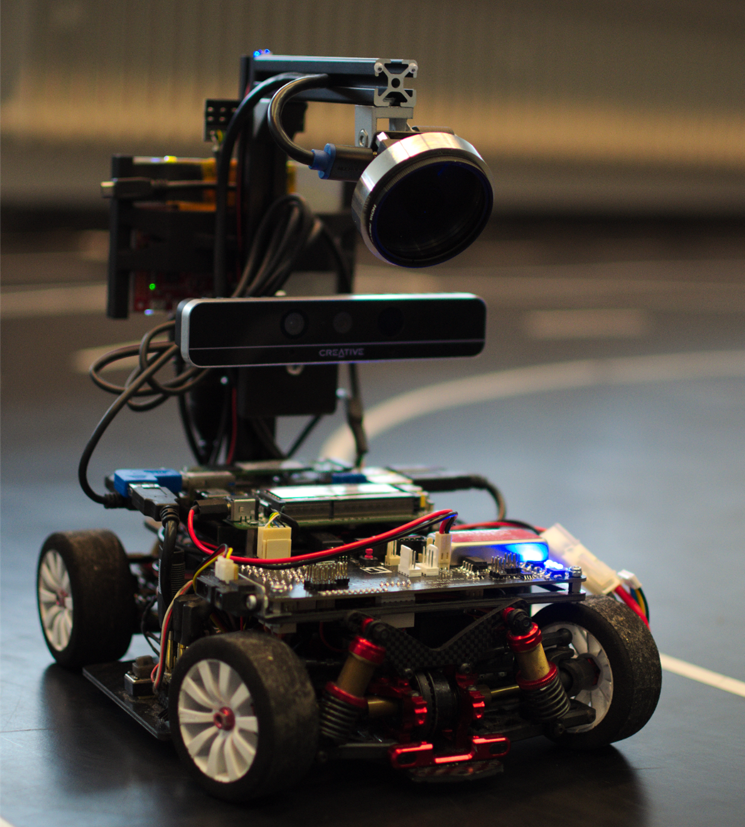
Since 2008, our student group Team GalaXIs implements perception and control algorithms on an autonomous model-scale vehicle in order to participate in the Carolo-Cup competition.