

Networked Model Predictive Control for Multi-Vehicle Decision-Making
Instructors

Dr.-Ing. Bassam Alrifaee
Lecturer

Patrick Scheffe, M. Sc.
Assistant Lecturer
Key Facts
The Cyber-Physical Mobility Group at the Chair of Embedded Software of RWTH Aachen University offers this PhD course.
We offered this course in the context of the International Graduate School on Control (IGSC) of the European Embedded Control Institute (EECI) in 2021.
This course is partly based on our master’s course Control and Perception in Networked and Automated Vehicles.
Course Description
This course combines theory of Networked Model Predictive Control (Net-MPC) with practical exercises in the Cyber-Physical Mobility Lab (CPM Lab, a lab for networked control systems).
In the theory part, we will discuss three strategies for Net-MPC: centralized, cooperative, and non-cooperative. We focus on distributing the control problem of multi-agent systems coupled via objective function or constraints using Distributed MPC (DMPC). The course will further discuss the application of Net-MPC to the decision-making problem in a multi-vehicle system, which prepares the participants for the practical lab work.
In the practical part, we will apply the Net-MPC strategies to vehicle platooning in the CPM Lab. The CPM Lab is an open source platform for networked and autonomous vehicles. We designed it to support rapid functional prototyping. It consists of 20 model-scale vehicles for experiments and a simulation environment. Software developed in simulations can be seamlessly transferred to experiments without any adaptions. Additionally, experiments with the 20 vehicles can be extended by unlimited additional simulated vehicles. The CPM Lab allows researchers as well as students from different disciplines to see their ideas develop into reality. The CPM Lab is completely designed and developed by the Cyber-Physical Mobility Group at RWTH Aachen University.
Course Outline
Course Materials
Here are the course materials (lecture slides, lab tasks, and lecture videos).
Use of Course Materials
Please take care of the following rules
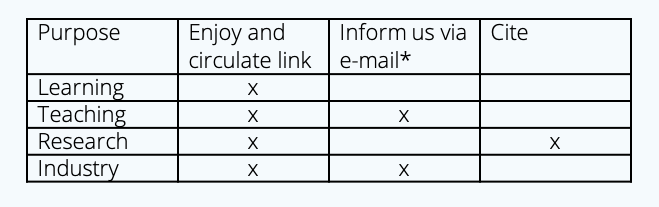
*cpm-info[at]embedded[dot]rwth-aachen[dot]de
Lecture slides
Lab Tasks
Coding Materials