
The Lab Control Center (LCC) is the main operation platform of the CPM Lab. It sets up experiments and has several features for an easy use of the CPM Lab.
visualization
The LCC visualizes the map, the vehicles, and the trajectories. The visualization can display both simulated and real vehicles at the same time.
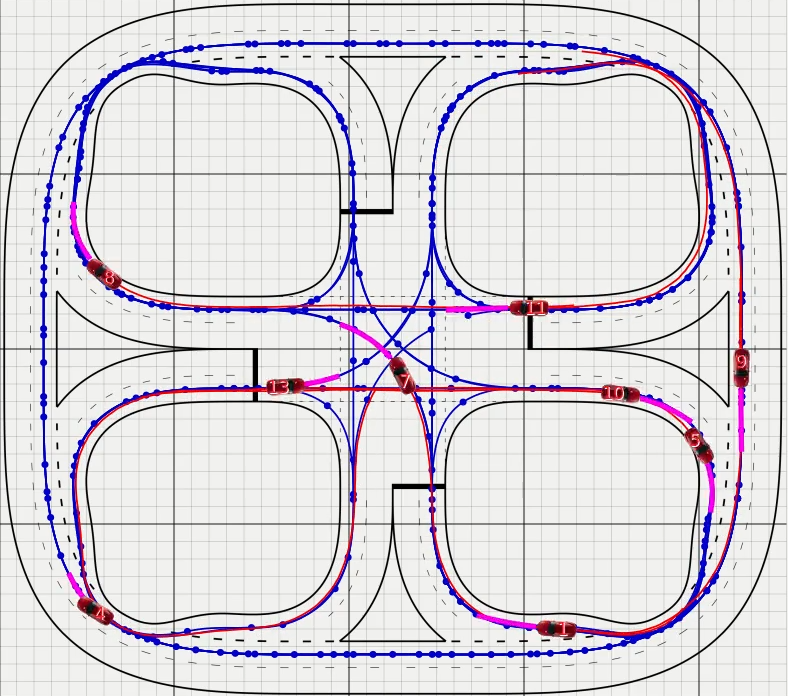
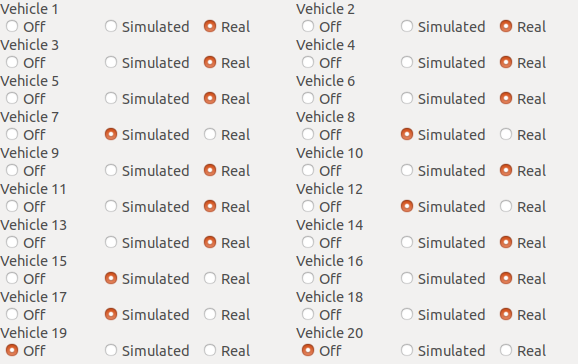
Real and simulated
The LCC can seamlessly switch between real and simulated vehicles. Experiments with real vehicles can be extended by simulated vehicles.
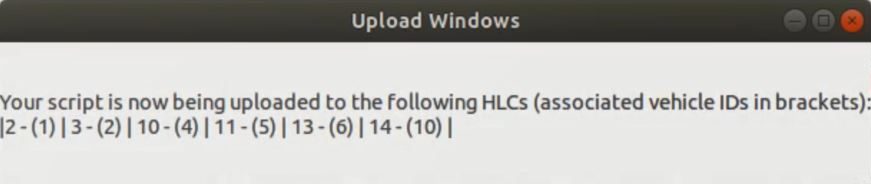
Deployment
The LCC deploys the software under test with all relevant parameters to the HLCs and performs startup and shutdown routines to set up the network.

diagnosis
The LCC shows important information of the vehicles, e.g., battery charge and detects system failures, e.g., loss of IPS data.
automated test setup
The vehicles are navigated to the starting poses defined in the CommonRoad-Scenario through the LCC using MATLAB.
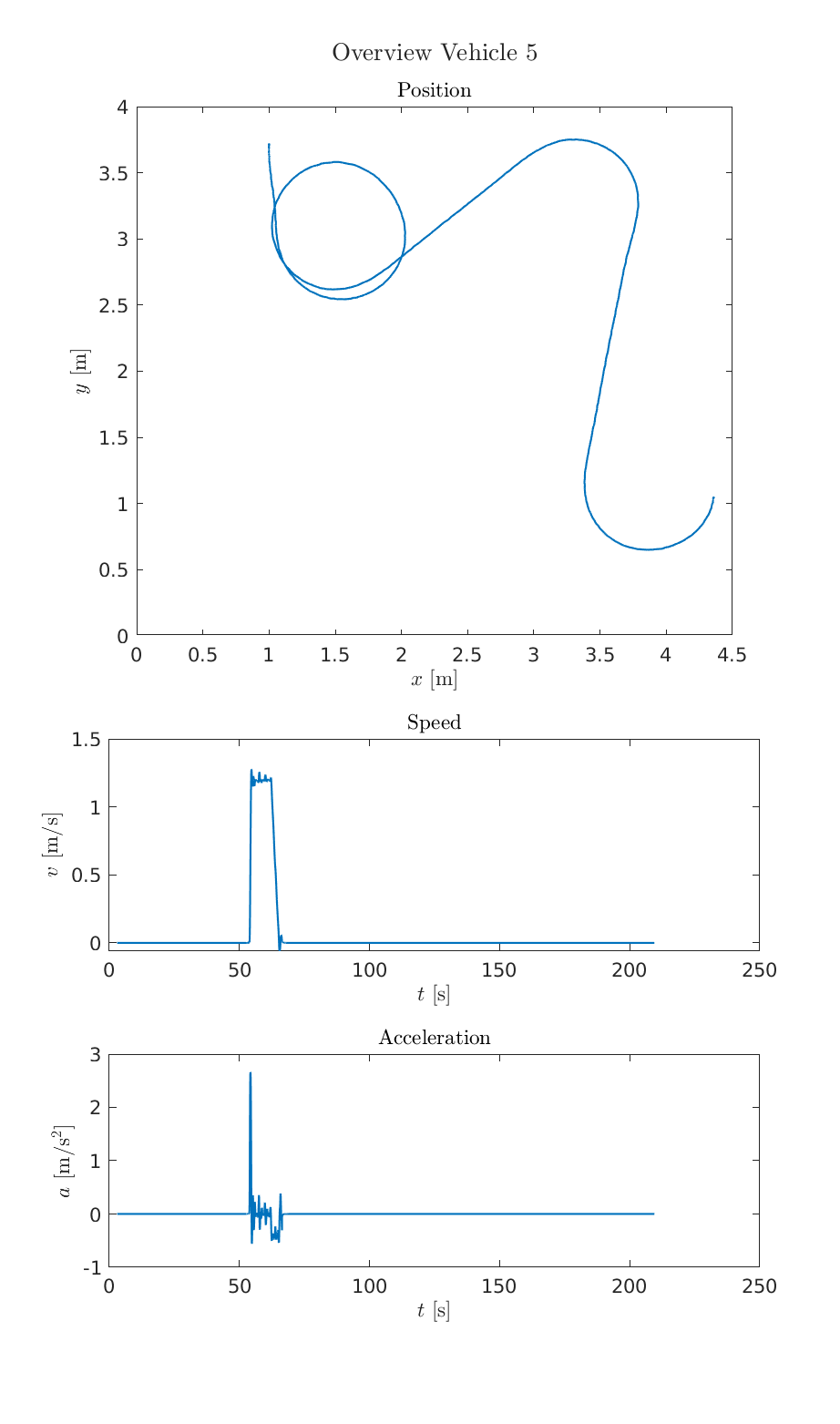
automated plotting
All data of an experiment is recorded automatically. After an experiment, the driven path, and the velocity and acceleration over time are visualized using MATLAB.