
Control and Perception in Networked and Autonomous Vehicles
Instructors

Dr.-Ing. Bassam Alrifaee
Lecturer

Simon Schäfer, M. Sc.
Assistant Lecturer

Patrick Scheffe, M. Sc.
Former Assistant Lecturer
Key Facts
The Cyber-Physical Mobility Lab at the Chair of Embedded Software of RWTH Aachen University offers this course.
We offered this course for the very first time in the winter term 2019/2020.
Due to lab capacity, currently, we are able to host only 30 students per class. We grasped this opportunity to provide a learning experience that is tailored towards the participants and builds on interactions between the lecturer and participants.
Students get six credit points for this course.
This course follows the concept ‘Method. Application. Experiment.’. The course teaches networked control methods applicable to systems consisting of multiple vehicles. The students apply the methods in experiments, which results in a high learning factor.
We designed this course for students in the master’s programs of Computer Science, Automation Engineering, and Computational Engineering Science. The students do lab exercises in teams of two students from two different study programs.
There are no special or necessary requirements to take this course. We start the course with a survey, which we call diagnostic test. The test aims to know the students’ pre-knowledge of various course topics, allowing the lecturer to adapt the content and the pace. Click here to go to the test.
Course Description
This course combines the theory of multi-agent decision-making with practical exercises in the Cyber-Physical Mobility Lab (CPM Lab, an open-source testbed for networked and autonomous vehicles).
In the theory part, we focus on distributing the control problem of multi-agent systems coupled via objective function or constraints using Distributed MPC (DMPC). Additionally, the course discusses the application in a multi-vehicle system, which prepares the participants for the practical lab work.
In the CPM Lab, the students implement controllers for vehicle platoons. The CPM Lab supports rapid functional prototyping. It consists of 20 model-scale vehicles for experiments and a simulation environment. Software developed in simulations can be seamlessly transferred to experiments without any adaptions. Additionally, experiments with the 20 vehicles can be extended by unlimited additional simulated vehicles. The CPM Lab allows researchers and students from different disciplines to see their ideas turning into reality. The CPM Lab is completely designed and developed by the Cyber-Physical Mobility Team at RWTH Aachen University.
If you cannot access the CPM Lab physically, check out our remote access.
The course covers the following topics
We recommend the following literature

R. Rajamani. Vehicle Dynamics and Control. Springer, 2012. DOI
S. Boyd and L. Vandenberghe. Convex Optimization. Cambridge University Press, 2009. pdf
F. Borrelli, A. Bemporad, and M. Morari. Predictive Control for Linear and Hybrid Systems, Cambridge University Press, 2017. pdf
J. Maciejowski. Predictive Control with Constraints. Prentice Hall, 2002.
B. Alrifaee. Networked Model Predictive Control for Vehicle Collision Avoidance. 2017. pdf
Learning Objectives
Knowledge and Understanding
After successful participation in the course, the students
Skills and Competences
After successful participation in the course, students are able to independently perform the necessary steps for the successful development of control and perception algorithms in networked and autonomous vehicles. In doing so, they independently take into account the different aspects of the development and are able to evaluate to what extent the available approaches, methods, and algorithms are applicable. They are also able to synthesize different control and perception algorithms. Furthermore, they can consider practical aspects by testing in the lab.
Lecture Style
The lectures combine the following teaching methods
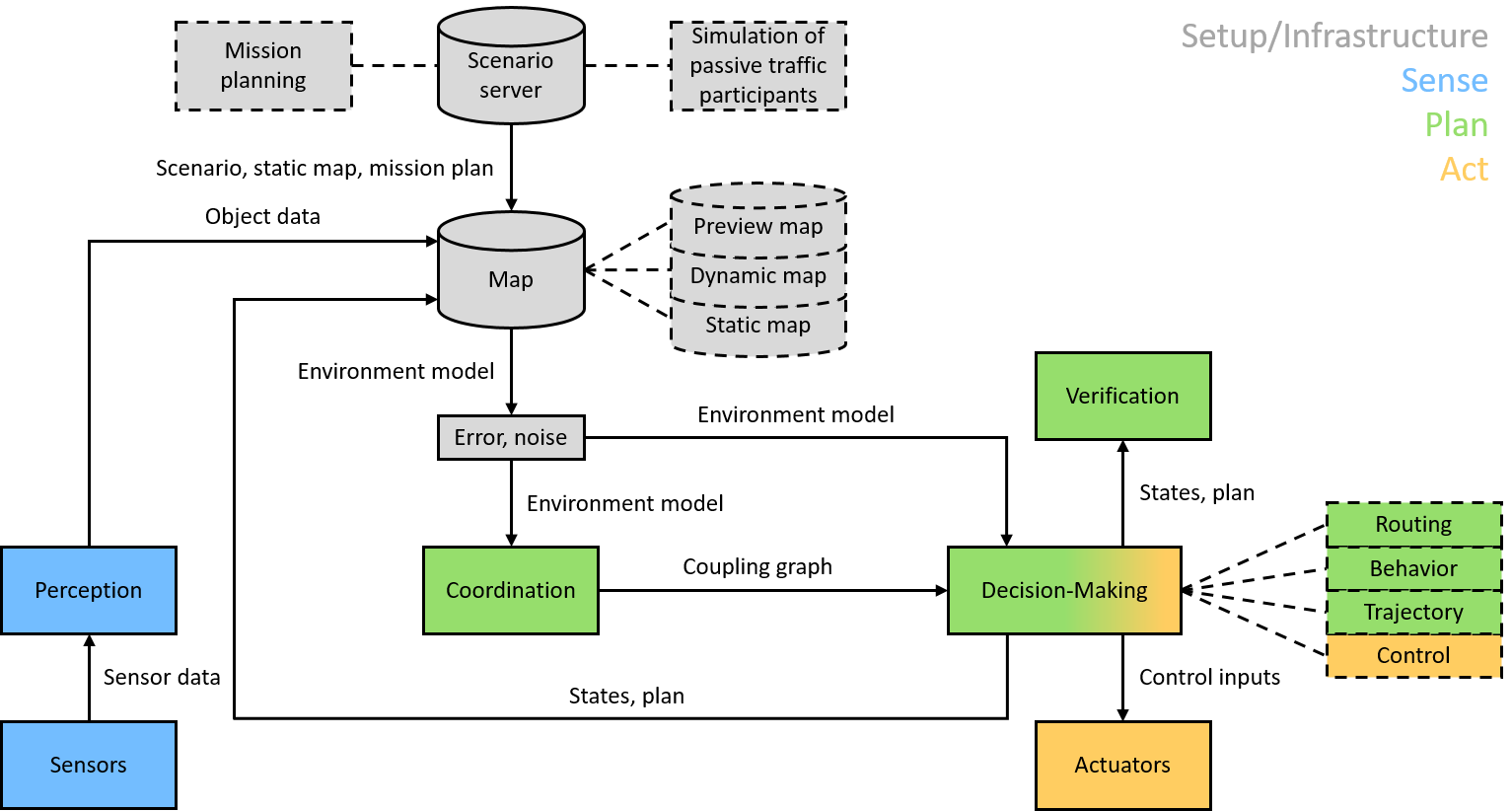
Each part of the lecture starts with mapping it to the lab architecture.
Lab Style
The students work on lab exercises in pairs, with each pair consisting of two students from different study programs. Each team is given eight lab sessions, each lasting four hours, to complete seven tasks, which include nine checkpoints in total. These checkpoints are assessed on-site by a teaching assistant. Passing these checkpoints earns points for the exam, as outlined in the following Exam section.
Exam
Since the winter term 2023/2024, the final grade is split into two equal parts, each worth 50 points, totaling 100 points. The first 50 points are gained from checkpoints during lab sessions. Meanwhile, the remaining 50 points are obtained from the 60-minute written exam, covering all lecture material.
Until the winter term of 2022/2023, exams were conducted orally, with each student allocated 20 minutes. The exam began with a 5-minute presentation using a unified template to discuss lab results, followed by 15 minutes of questions covering lecture content and lab work.
Evaluation
The evaluation scale is from 1.0 (best) to 5.0 (worst).
– Lecture: 1.5
– Exercise: 1.9
– Average of Department: 1.7
– Lecture: 2.0 (students watched video recordings from the winter term 2020/2021)
– Exercise: 1.8
– Average of Department: 1.8
– Lecture: 1.4
– Exercise: 1.6
– Average of Department: 1.9
– Lecture: 1.8
– Exercise: 1.8
– Average of Department: 1.8
– Lecture: 1.6
– Exercise: 1.8
– Average of Department:
1.8
Statistics
Registered Students
– 15 Computer Science
– 13 Automation Engineering
– 1 Computational Engineering Science
– 1 Systems Engineering
Attendance
– Lecture: on average 19.2 of 30 registered students (64%)
– Lab: 25 of 30 registered students (83%)
– Exam: 24 of 25 lab attendees (96%)
Registered Students
– 14 Computer Science
– 15 Automation Engineering
– 1 Electrical Engineering
Attendance
– Lecture: on average 15 of 30 registered students (50%)
– Lab: 25 of 30 registered students (83%)
– Exam: 21 of 25 lab attendees (84%)
Registered Students
– 7 Computer Science
– 19 Automation Engineering
– 4 Computational Engineering Science
Attendance
– Lecture: on average 18.1 of 30 registered students (60%)
– Lab: 24 of 30 registered students (80%)
– Exam: 24 of 24 lab attendees (100%)
Registered Students
– 13 Computer Science
– 12 Automation Engineering
– 5 Computational Engineering Science
Attendance
– Lecture: on average 24.6 of 30 registered students (82%)
– Lab: 26 of 30 registered students (87%)
– Exam: 26 of 26 lab attendees (100%)
Registered Students
– 15 Computer Science
– 13 Automation Engineering
– 2 Computational Engineering Science
Attendance
– Lecture: on average 21.5 of 30 registered students (72%)
– Lab: 26 of 30 registered students (87%)
– Exam: 24 of 26 lab attendees (92%)
Course Materials
Here are the course materials (lecture slides, exercise sheets, lab tasks, and lecture videos) of the winter term 2023/2024. They are in continuous development. We will offer the course in the winter term 2024/2025 again and will publish the course materials here after accomplishment.
Use of Course Materials
Please take care of the following rules
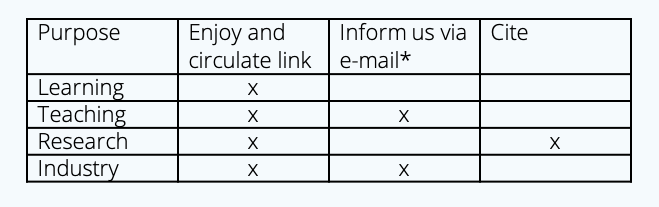
*cpm-info[at]embedded[dot]rwth-aachen[dot]de